En términos de diseño y tecnología de productos, el desarrollo de drones quadrotor es un fenómeno nuevo. Esta ha sido la forma más popular de drones civiles durante mucho tiempo. En los últimos años ha aparecido en el mercado un nuevo tipo de drone para agricultura XAG, el drone de doble rotor.
Durante mucho tiempo, se discutió la cuestión de si los drones de dos rotores eran más eficientes. Sin embargo, el punto de partida de la discusión es diferente. La opinión de la mayoría de la gente sobre el tema es que "faltan dos rotores". No es tan simple como eso.
Antes de que podamos hablar sobre la eficiencia de los drones para agricultura, es importante comprender dos factores clave que afectan la eficiencia de los drones agricultores: potencia o potencia y consumo. Cualquier objeto solo puede moverse si tiene una fuerza efectiva.
Los dos rotores del drone para agricultura se perderán si está sujeto a un consumo constante. Para poder volar, debe tener suficiente fuerza de apoyo. La solución es simple: ¡Haz la paleta más grande! La hoja debe ser lo más grande posible para ejercer la mayor fuerza.

Los dos factores principales que afectan el consumo de energía del UAV son la gravedad y la resistencia al flujo de aire. El peso del UAV con motor de doble rotor se redujo significativamente. Además, también se redujo el consumo de energía de los otros dos rotores. Los UAV de cuatro rotores requieren que los cuatro rotores giren simultáneamente en direcciones opuestas. Cancela las fuerzas mutuas para garantizar que la aeronave pueda moverse hacia arriba al tener suficiente potencia.
Es importante mantener el avión equilibrado y estable. En comparación con el UAV que utiliza doble rotor, el consumo es mayor. Los UAV con rotores dobles pueden proporcionar más potencia y reducir el consumo general, lo que mejora la eficiencia general. El drone para agricultura XAG tendrá menos energía y la duración de la batería se extenderá. No es posible aumentar las palas si el UAV tiene un diseño de doble rotor y quiere volar en una dirección particular.
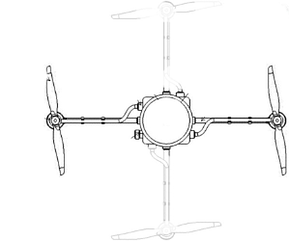
El diseño de la superficie del timón de inclinación se puede utilizar en los vehículos aéreos no tripulados de doble rotor. Esto permite un vuelo direccional al inclinar ligeramente los rotores. La hélice se inclina hacia adelante cuando el UAV con rotores dobles vuela hacia adelante. En vuelo, el UAV puede convertir rápidamente la sustentación en una tracción hacia adelante. Los UAV de doble rotor serán más eficientes y acelerarán más rápido.
El control diferencial de su mecanismo de gobierno se puede utilizar para girar el UAV. Esto le permitirá utilizar más fuerza en las curvas y aumentar la velocidad de giro.
Los drones de cuatro rotores dependen de cambiar la velocidad y la dirección de los rotores delantero y trasero para ganar tracción. Sin embargo, los drones de cuatro rotores también pueden cambiar la velocidad de los rotores diagonales para aumentar la potencia en las curvas. Los rotores duales tienen una eficiencia más baja.
El argumento de la eficiencia sigue siendo relevante. Los drones de doble rotor son más potentes que los de cuatro rotores y pueden moverse de manera direccional o rotatoria.
Jifei también ha presentado el UAV V40 para la protección de plantas agrícolas, que es más eficiente y se puede utilizar en el campo.

Los UAV de la serie Jifei P tienen cuatro rotores. La estructura y el algoritmo del UAV son muy simples. La potencia de salida de cada rotor se puede ajustar individualmente. Si desea avanzar, puede reducir la potencia de salida de los rotores delanteros y aumentar la salida de los rotores traseros. Esto le permitirá inclinarse hacia adelante mientras está bajo acción. Usando la misma fuerza de reacción, puede operar hacia atrás a la izquierda y a la derecha.
El UAV de cuatro rotores también gira a la izquierda y a la derecha, como la pista de un tanque. La pista de un lado del tanque gira lentamente mientras que la pista del lado opuesto se mueve rápido. Entonces, la pista que es más rápida empuja la dirección del automóvil. Para mantener la dirección, muévete hacia el lado más lento. Los drones de cuatro rotores se basan en que el rotor se mide en oposición a la dirección del volante para girar más rápido y obtener más resistencia al aire (y, por lo tanto, momento de rotación) para impulsarse en otra dirección.
Debido a que la fricción en el aire es menor que en el suelo, la eficiencia de dirección del UAV de cuatro rotores también es baja. El algoritmo de control PID detecta la inclinación de la aeronave. Este es un dron de cuatro rotores. Los rotores duales oscilarán y se sacudirán, creando un efecto de péndulo. La superposición entre los dos rotores se vuelve más grande y más difícil, lo que dificulta que los rotores trabajen juntos.
Es importante controlar la velocidad y la rotación del rotor cuando detecta que la punta está cayendo. El algoritmo quadrotor es más complicado que el quadrotor porque tiene que controlar el cambio de velocidad, que es el cambio en el ángulo de inclinación y la velocidad de rotación. La potencia de salida también se conoce como ESC o gobernador electrónico. Sin embargo, el quadrotor solo controla el ángulo. No solo usan ESC, sino también servos (también conocidos como engranajes de dirección). Ambos rotores están equipados con la teoría de las superficies de control.
El control de vuelo super4 del V40 tiene 6 unidades detectoras de impulsos IMU. La velocidad de control es de 200 veces por segundo, que es la detección de impulsos en todas las direcciones. La IMU es el equivalente de un cerebelo humano durante el vuelo de un avión. Se ha mejorado el algoritmo del chip.
Ya muy útiles, se han desarrollado los UAV de cuatro rotores Jifei. Jifei quiere crear un UAV de dos rotores.
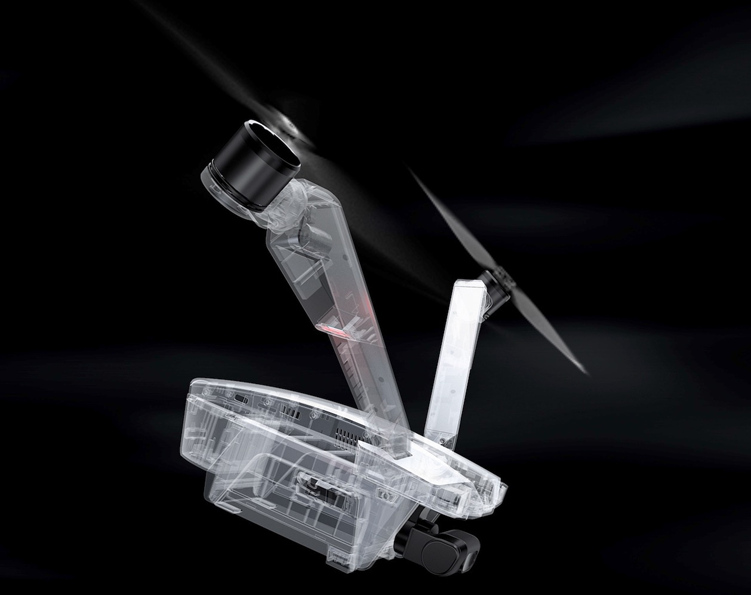
Los multirrotores tienen la ventaja de que el algoritmo se puede mejorar. El cuatro rotor debe moverse una vez y todo el avión debe moverse. Sin embargo, el de dos rotores puede hacer lo mismo. La estructura de sustentación está sostenida por los brazos que cuelgan del fuselaje. La velocidad de control y el ajuste del ángulo deben ser lo suficientemente rápidos para permitir la máxima estabilidad.
Esta plataforma estable es capaz de realizar operaciones más
complejas como recolección de frutas, corte de ramas, muestreo y captura de
insectos. Se utiliza un poderoso algoritmo para ajustar la posición del rotor
para que coincida con los cambios ambientales. Esto permite que la plataforma
elevadora realice un trabajo más preciso. El UAV de doble rotor XAG V40 es una
nueva plataforma que es estable y se puede utilizar tanto para la agricultura
como para la operación de vehículos aéreos no tripulados.